Второй закон Ньютона (для материальной точки) – основной закон механики. Модель демонстрирует равноускоренное движение тележки, положения которой периодически отмечаются. Показаны график скорости, векторы скорости и значения скорости. Массу тележки и действующую на нее силу можно изменять
Второй закон Ньютона (для материальной точки) - основной закон механики -записывается так:

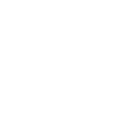
где m - масса тела, F - действующая на него сила, a - ускорение. Это значит, что под действием силы F тело массы m движется с ускорением a.Закон устанавливает связь между силой, ускорением и массой. Если сила F постоянна, то движение материальной точки является равноускоренными кинематический закон движения (в векторном виде) записывается так:
где r(t) - радиус вектор точки в момент времени t, v(t) - вектор скорости точки в момент времени t, r0 - радиус-вектор точки в начальный момент времени, v0 - начальная скорость.
Модель демонстрирует равноускоренное движение тележки (на воздушной подушке, поэтому трение пренебрежимо мало). В координатном виде движение описывается уравнениями: x(t)=at²/2, v(t)=at. Отмечаются положения тележки через одну секунду, изображаются векторы скорости (зеленые векторы) и выводятся значения скорости в эти моменты времени.
При этом полная масса может быть от 1 до 4. После запуска тележка начинает двигаться под действием силы и откладываются значения модуля скорости, измеряемые каждую секунду.
Если на протяженное тело действует несколько сил, его движение не определяется равнодействующая всех сил, необходимо учитывать точки приложения сил. Модель демонстрирует сложность движения протяженного тела под действием трех сил. Можно менять величины сил и точки их приложения.
Если на тело (протяженное, не материальную точку) действует несколько сил, то движение тела не определяется вторым законом Ньютона в виде

где F - сумма всех действующих на тело сил (равнодействующая). Для описания движения в этом случае необходимо учитывать точки приложения сил.
Модель демонстрирует сложность движения протяженного тела под действием трех сил. Можно менять величины сил и точки их приложения. Эксперименты с моделью показывают, что равенство нулю равнодействующей еще не означает, что тело будет находиться в покое. Протяженное тело может не только сдвигаться параллельно, но и поворачиваться.
Тела различной массы и формы падают по-разному из-за сопротивления воздуха. Модель наглядно демонстрирует падение тел в трубке, давление воздуха в которой можно изменять.
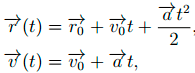
Тела различной массы и формы падают по-разному из-за сопротивления воздуха. При увеличении давления воздуха это различие усиливается. Сила, заставляющая тела падать равна mg=Fс , где Fс- сила сопротивления. При малых скоростях сила Fс пропорциональна скорости, а при больших - квадрату скорости. Направление силы зависит от формы тела.
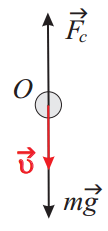
Рис. На тело, падающее в воздухе, действуют лве силы: сила притяжения mg и сила сопротивления Fc. Сила сопротивления Fc зависит от размеров тела, его формы, от скорости движения тела и от плотности воздуха.
Модель демонстрирует падение тел в трубке, давление воздуха в которой можно изменять. При уменьшении давления воздуха до нуля эти тела падают одинаково, т. к. в пустоте силы сопротивления нет, и тело падает с ускорением свободного падения g=9.81 м/с². Нажав на кнопку Пауза в момент падения тел, можно увидеть разницу в их движении.
Движение тела (материальной точки) с постоянным ускорением a (равноускоренное движение) полностью определяется его начальным положением r0 и начальной скоростью v0, см. рис. а.
Рис. Движение тела с постоянным ускорением a. а) Начальные условия: начальное положение O тела и начальная скорость v0 тела. б) Выбор система координат для тела, брошенного под углом к горизонту. Центр системы координат совпадает с начальным положением тела, ось Oy параллельна вектору a, но направлена в противоположную сторону, ось Ox лежит в плоскости, параллельной векторам a и v0.
Выбрав систему координат, как показано на рис , векторное уравнение движения (второй закон Ньютона)

можно записать в виде двух (скалярных) уравнений
с начальными условиями x(0)=0, vx(0)=v0·cos (α) и y(0)=0, vy(0)=v0 sin (α). Эти уравнения не связаны друг с другом. Следовательно, движение тела, брошенного под углом к горизонту, сводится к двум независимым движениям: равномерному вдоль оси Ox и равноускоренному движению вдоль оси Oy. Точнее, первое уравнение описывает равномерное движение точки с начальной скоростью v0cos(α), а второе - равноускоренное движение точки с ускорением g и с начальной скоростью v0sin(α). Поэтому, используя известные формулы для равномерного и равноускоренного движений, можно написать зависимость координат тела от времени:
Модель наглядно демонстрирует зависимость дальности полета тела, брошенного под углом к горизонту, от угла бросания.
Движение тела с постоянным ускорением g (равноускоренное движение) полностью определяется начальным положением r0 и начальной скоростью v0 . В векторном виде кинематический закон движения имеет вид (1)
Скорость изменяется по закону v (t)= v0 +gt. Если выбрать систему координат Oxy как показано на рисунке и рассмотреть движение проекций тела на оси координат, то по оси Ox движение будет равномерным, апо оси Oy - равноускоренным с ускорением gy=-g.
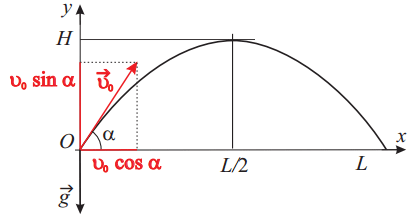
Рис. Система координат для тела, брошенного под углом к горизонту.
Итак, в координатах, выбранных, как показано на рис., векторное равенство (1) записывается в виде системы равенств: (2)
В момент времени t1 тело достигает наибольшей высоты H, если vy(t1)=0 (проекция скорости на ось Oy зависит от времени так: vy(t)=v0 sin (α) -gt). Отсюда

Из симметричности параболы следует, что время полета t2=2 t1. Дальность полета L=x(t2). Тогда

Для получения уравнения траектории нужно из двух уравнений кинематического закона движения (2) исключить время. Для этого выражаем t из первого уравнения системы (2)(вместо x(t) и y(t) будем писать x и y соответственно)
и подставляем это в правую часть второго уравнения этой системы

После упрощения получаем уравнение траектории

что можно было получить, записав уравнение параболы с вершиной в точке (L/2,H), пересекающей ось Ox в точках с абсциссами 0 и L.
Tвердое тело, на которые действуют силы, изменяет свою форму, деформируется. Величина деформации зависит от свойств материала тела, величины и направления приложенных сил. Модель демонстрирует растяжение и сжатие резинового образца, имеющего форму стержня. Показан график, показывающий зависимость растяжения стержня от нагрузки.
Твердое тело, на которые действуют силы, изменяет свою форму, деформируется. Величина деформации зависит от свойств материала тела, величины и направления приложенных сил.
При малых деформациях величина деформации прямо пропорциональна величине приложенной силы. Точнее, закон Гука формулируется так: модуль силы упругости (при малых деформациях) прямо пропорционален величине абсолютного удлинения тела. Это записывается так:
где Fупр - сила упругости (точнее, модуль силы упругости), k - жёсткость тела, l - абсолютное удлинение.
Если вместо модулей использовать проекции вектора силы упругости Fупр и вектора перемещения Δl конца стержня на направление действующей силы, то закон Гука записывают так (в прежних обозначениях)
где знак минус означает, что сила упругости и перемещение имеют противоположные направления. Формально сжатие можно считать отрицательным растяжением.
Модель демонстрирует растяжение и сжатие резинового образца, имеющего форму стержня. График показывает зависимость растяжения стержня от нагрузки (т. е. от веса гири). Результаты проведенных экспериментов изображаются на графике точками. На графике сила веса гири откладывается в Ньютонах.
Разложение силы на составляющие – это задача отыскания нескольких сил, равнодействующей которых была бы данная сила. Модель демонстрирует разложение силы тяжести, действующей на, лежащий на наклонной плоскости брусок. Показаны три силы: сила тяжести, сила нормальной реакции опоры и сила трения. Можно изменять угол наклона плоскости.
Модель демонстрирует разложение силы тяжести, действующей на брусок, лежащий на наклонной плоскости. Показаны три силы: сила тяжести P, сила нормальной реакции опоры N и сила трения F . Силу тяжести можно разложить на две составляющие - вдоль наклонной плоскости P ' и перпендикулярно к ней P '', см. рис. Сила реакции N равна по модулю силе P ''}, но направлена противоположно: N =-P ''. Из прямоугольного треугольника находим P''=P cos (α) и P'=P sin (α). Брусок находится в равновесии, если сумма всех действующих на него сил равна нулю. Видим, что для равновесия должно быть F=P'. Но сила трения не может быть по модулю больше, чем kN, где k - коэффициент трения. Поэтому условие равновесия бруска можно записать в виде неравенства P'> kN.
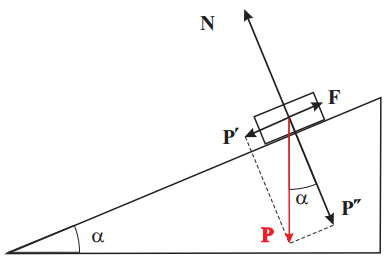
Рис. Силы действующие на брусок, лежащий на наклонной плоскости.
Брусок на наклонной плоскости находится в равновесии, если проекция P'=P sin (α) силы веса на плоскость не больше kN=kP cos (α), где k - коэффициент трения.Из этого условия следует соотношение tg (α) ≥ k, при выполнении которого брусок не соскальзывает с наклонной плоскости.
В отличие от сухого трения сила вязкого трения обращается в нуль при нулевой скорости движения. Поэтому, сколь угодно малая внешняя сила может сообщить относительную скорость слоям вязкой среды, что проявляется как текучесть жидкости. Модель наглядно демонстрирует зависимость силы сопротивления, действующей на твердое тело в потоке вязкой (жидкой или газообразной) среды, от формы и размеров тела, направления движения среды.
При движении тел в жидкой или газообразной среде возникают так называемые силы сопротивления среды. Величина силы сопротивления зависит от формы и размеров тела, состояния его поверхности, скорости по отношению к среде и от свойства среды, называемого вязкостью. При сравнительно небольших скоростях сила трения зависит от скорости линейно:

причём сила вязкого трения всегда направлена в сторону, противоположную направлению скорости тела. При больших скоростях сила сопротивления пропорциональна квадрату скорости:

Эти зависимости являются приближёнными, коэффициенты k1 и k2 существенно зависит от формы и размеров тела, состояния его поверхности, вязких свойств среды (и немного от скорости).
Модель наглядно демонстрирует зависимость силы сопротивления, действующей на твердое тело в потоке вязкой (жидкой или газообразной) среды, от формы и размеров тела, направления движения среды. Условно показаны струйки жидкости. Сильное расхождение струек вызывает завихрения и обычно увеличивает силу сопротивления. Принято говорить о хорошо или плохо обтекаемых телах. В модели требуется определить, какие из тел хорошо обтекаемы, а какие плохо.
Основной задачей статики является изучение условий равновесия тел при действии на них сил. Модель содержит три груза, нити от которых связаны в одной точке. Две нити перекинуты через блоки. Массы грузов и положения блоков можно менять, при этом показана равнодействующая сил, приложенных в точке соединения нитей
Основной задачей статики является изучение условий покоя тел при действии на них сил, т. е. условий равновесия тел. Статика позволяет также дать ответ и на некоторые вопросы, касающиеся движения тел.
Если силы, действующие на тело, приложены в одной точке, то тело находится в равновесии, когда (векторная) сумма всех действующих сил равна нулю.
Модель содержит три груза, нити от которых связаны в одной точке. привяжем к ним разные грузы и перекинем две из нитей через блоки. соединены в одной точке. Две нити (от грузов №1 и №3) перекинуты через блоки. Массы грузов и положения блоков можно менять, при этом показана (красный вектор) равнодействующая сил, приложенных в точке соединения нитей. После нажатия кнопки Пуск система начинает двигаться и хорошо видно, что точка соединения нитей перемещается в направлении равнодействующей. Хотя масса точки соединения нитей, как и самих нитей пренебрежимо мала, движение этой точки связано с движением всех трех масс. Поэтому масса нашей системы приближенно равна сумме масс грузов, т. е. m1+m2+m3, а ускорение этой точки -
В конце концов движение прекращается, система достигает равновесия, и равнодействующая сил становится равной нулю.
Статика изучает условия равновесия системы твердых тел. В инерциальной системе отсчета твердое тело находится в равновесии, если векторная сумма всех действующих на тело сил и векторная сумма моментов этих сил равны нулю. При выполнении первого условия равно нулю ускорение центра масс тела. При выполнении второго условия отсутствует угловое ускорение вращения тела. Поэтому, если в начальный момент тело покоилось, то оно будет оставаться в покое и дальше.
Если все силы, действующие на тело, приложены в одной точке, то моменты этих сил относительно этой точки равны нулю и, следовательно, тело будет находиться в равновесии, если равнодействующая приложенных сил равна нулю. Если все действующие силы лежат в одной плоскости, то векторное условие

сводится к двум скалярным равенствам
конкретный вид которых зависит от расположения координатных осей Ox и Oy в плоскости действия сил.
Модель наглядно демонстрирует движение лестницы, приставленной к стене. Показаны действующие силы. Для простоты учитывается только трение нижнего конца лестницы о горизонтальную плоскость, а трение верхнего конца о стенку считается пренебрежимо малым.
Если тело не может двигаться свободно в любом направлении, а движения его ограничены другими твердыми телами, то в механике эти ограничивающие тела называют жесткими связями. Силы, действующие со стороны связей, называют силами реакции связей. Если эти ограничивающие тела очень жесткие, то уже при незначительных деформациях возникают очень большие силы реакции связей, которые и обеспечивают возможность перемещения лишь в определенных направлениях.
Модель демонстрирует движение лестницы, приставленной к стене. Для простоты учитывается только трение нижнего конца лестницы о горизонтальную плоскость, а трение верхнего конца о стенку считается пренебрежимо малым.
Итак, на лестницу действует четыре силы: силы реакции и , сила тяжести лестницы и сила трения тр. Для равновесия лестницы необходимо, чтобы равнодействующая (т. е. сумма) всех сил была равна нулю, т. е.

В равновесии это выполняется автоматически, сила реакции равна по модулю силе тяжести и направлена в противоположную сторону. Сила реакции должна уравновешиваться силой трения (покоя) тр, удовлетворяющей неравенству но найти их величины мы не можем, известно лишь, что

где k -коэффициент трения (покоя) нижнего конца лестницы относительно пола.
Второе необходимое условие равновесия --- сумма моментов приложенных к телу сил равна 0. Точку, относительно которой вычисляются моменты сил выберем так, чтобы сключить силу . Это точка A - верхний конец лестницы. пересечения линий действия сил и . Тогда ненулевыми могут быть лишь моменты сил , тр и и условие равновесия (т. е. равенство нулю суммы моментов) записывается так

где l sin(α) - плечо силы тр, (l/2) cos(α) - плечо силы . Получаем неравенство

откуда, сокращая на Pl, получаем условие равновесия лестницы 2k ≥α, связывающее коэффициент трения покоя k и угол α наклона лестницы. Если это неравенство не выполняется (угол α слишком мал или мал коэффициент трения), то лестница сползает по стенке вниз.
Модель наглядно демонстрирует движение лестницы, приставленной к стене. Показаны действующие силы. Положение маляра на лестнице можно изменять и это не только дает еще один параметр, но и объясняет, как используется центр тяжести системы тел. Для простоты учитывается только трение нижнего конца лестницы, а трение верхнего конца о стенку считается пренебрежимо малым.
Модель демонстрирует движение лестницы, приставленной к стене. Положение маляра на лестнице можно изменять и это не только дает еще один параметр, но и объясняет, как используется центр тяжести системы тел. Для простоты учитывается только трение нижнего конца лестницы о горизонтальную плоскость, а трение верхнего конца о стенку считается пренебрежимо малым.
Итак, на систему тел маляр+лестница действует четыре силы: силы реакции опор и , сила тяжести лестницы и маляра , приложенная в центре тяжести системы, и сила трения тр. Для равновесия системы необходимо, чтобы равнодействующая (т. е. сумма) всех сил была равна нулю. В равновесии это выполняется автоматически, сила реакции равна по модулю силе тяжести и направлена в противоположную сторону. Сила реакции должна уравновешиваться силой трения (покоя)тр , удовлетворяющей неравенству
где k- коэффициент трения покоя нижнего конца лестницы относительно пола. Второе необходимое условие равновесия - сумма моментов приложенных к телу сил равна 0. Если условие равновесия не выполняется (угол α слишком мал, или мал коэффициент трения, или маляр слишком близок к верхнему концу лестницы), то лестница сползает по стенке вниз.
Модель наглядно демонстрирует равновесие тела, закрепленного на опоре, к которому можно прикреплять различные грузы – гирьки и шарики. Тело находится в равновесии, если (алгебраическая) сумма моментов всех действующих на тело сил равна нулю.
При исследовании равновесия тела, закрепленного на оси, можно не рассматривать силу, действующую со стороны оси, так как она не может вызвать вращения тела (плечо этих сил равно нулю). Если на тело, закрепленное на горизонтальной оси, действует только две силы, направленные вертикально, то для равновесия необходимо, чтобы
1) эти силы, действуя в отдельности, поворачивали тело в противоположных направлениях;
2) произведение модуля силы на расстояние от оси вращения до линий, вдоль которых действует сила (и еще направление). одинаковы для обеих сил.
Если обозначить модули сил через F1 и F2, а расстояния (плечи) через l1 и l2, то условие равновесия записывается в виде равенства:
Предполагается, что каждая из сил лежит в плоскости, перпендикулярной к оси вращения (не обязательно в одной и той же). Произведение вида F l называют моментом и это произведение берется со знаком + или - в зависимости от того в положительном или отрицательном направлении действует сила. Следовательно, момент силы относительно оси равен
Тело, закрепленное на оси находится в состоянии равновесия, если (алгебраическая) сумма моментов всех действующих на тело сил равна нулю. Пример. (Вставить скриншот модели и объяснить вычисление суммы моментов.